Все о радаре и сонаре

Иногда, когда соблюдены определенные условия, Вы можете услышать собственное эхо. Если Вы крикните «Привет!», звук может отразиться от большого объекта, и Вы услышите собственный голос. Это и называется эхо. Морской радар и сонар – это электронные устройства, которые используют принцип эхо для обнаружения и локализации объекта.
Что такое радар?

Слово «Радар» («Radar») было образовано от английского словосочетания «radio detection and ranging»(«радиообнаружение и дальность»). Радиоволны представляют собой тип электромагнитного излучения (микроволновые печи, рентгеновские лучи и световые волны другого типа). Это основа данной технологии. Дальность означает измерение расстояния до цели от РЛС (устройство, которое отправляет радиосигнал и принимает обратно его отражение).
Как радар работает

РЛС (также называемые радиолокационными станциями) бывают разных размеров, в зависимости от тех целей, где их используют. Но все они состоят из четырех основных частей: передатчика, антенны, приемника и дисплея. Передатчик испускает радиоволны. Когда радиоволна доходит до объекта, например самолета, она отражается обратно к станции. Антенна обнаруживает отраженный сигнал и отправляет на приемник, который его увеличивает и усиливает. Затем, сигнал отправляется на дисплей как изображение.
Импульсная передача позволяет определить расстояние более точно. Почему это так? Представьте себе, как Вы кричите, чтобы услышать эхо. Если Вы кричите продолжительное время, то первые слова вернутся прежде, чем Вы закончите, и Вы не сможете услышать все предложение. Но если Вы крикните что-то короткое, то без проблем распознаете свое эхо.
Расположение цели по отношению к РЛС определяется немного иначе. Радарная антенна отправляет импульсы узким лучом, примерно как светит фонарь. Антенна и, соответственно, луч вращается медленно и проходит через все возможные препятствия в поисках целей. Сигнал отражается от корабля или какой-либо другой цели, только если луч задел её. Возвращенный сигнал усиливается приемником и отображается на мониторе, где показывается расстояние и направление до цели.

Применение радара
Также радары используются в метеорологии, при прогнозировании погодных условий. Синоптики, как правило, используют их в сочетании с лидаром (оптическим радаром) для изучения штормов, ураганов и других погодных катаклизмов. Доплеровский радар основывается на принципе эффекта Доплера – т. е. изменение частоты и длины волны для наблюдателя (приемника) из-за движения источника излучения или наблюдателя (приемника). Анализируя изменения частоты отраженных радиоволн, доплеровский радар может отслеживать движение штормов и развитие торнадо.
Ученые используют радары, чтобы отслеживать миграцию птиц и насекомых, определять расстояние до планет. Потому как он может показать в каком направлении и как быстро движется объект, радар используется полицией для определения нарушений скоростного режима. Подобные технологии используются в спорте, например в теннисе, чтобы определить скорость подачи. Радар используют спецслужбы, чтобы сканировать объекты. В военных целях радары, в большей степени, применяют в качестве поиска целей и управления огнем.
История радара
История радарной технологии началась с экспериментов с использованием радиоволн немецким физиком Генрихом Герцом в 1887 году. Он обнаружил, что волны могут проходить через одни объекты, но отражаться другими. В 1900 году Никола Тесла заметил, что крупные объекты могут отражать достаточно сильные сигналы. Он понял, что волны были отраженными радиосигналами, и предсказал, что они могут быть использованы для поиска положения и направления судов в открытом море.
Впервые импульсный радар был представлен в США в 1925 году. В 1935 году радар был запатентован в британском патентном бюро как результат исследований во главе с шотландским физиком Робертом Александром Уотсон-Уоттом. Этот запатентованный радар был применен в радарных системах, которые оказались эффективны против немецкой авиации во время воздушных налетов на Великобританию, в период Второй мировой войны.(1939-1945 г.г.) Термин «радар» был впервые использован учеными ВВС США во время этой войны.
Прогресс в сфере радарных технологий продолжается до сих пор, усилия направлены на улучшение качества изображения, точности размера и снижения стоимости.

Что такое сонар?
Слово «сонар» происходит от англ. «sound navigation and ranging». Сонар может обнаруживать и определять местоположение объектов в толще воды при помощи эхо, аналогично дельфинам и другим морским животным, которые используют принцип эхолокации.
Как сонар работает
Есть два типа сонара: активный и пассивный. Активный отправляет импульсы и затем принимает отраженный сигнал эхо. Пассивный принимает сигнал, без отправки собственного. В активных гидроакустических системах звуковые сигналы намного мощнее, чем обычные звуки. Каждый импульс длится доли секунды.
Некоторые сонары излучают звуки, которые Вы можете услышать. Другие сигналы настолько высоки, что человеческое ухо не в силах их воспринять. Такие сигналы называются ультразвуковыми волнами (за пределами звука). У сонара имеется собственный приемник, который способен принять возвращенный эхо-сигнал. Положение объектов под водой можно определить по разнице между отправкой и приемом звукового сигнала.
Применение сонара
Сонар имеет множество применений. Подводные лодки используют сонар для обнаружения других судов. Технологию применяют для измерения глубин (эхолот). Эхолот измеряет время, необходимое для звукового импульса, чтобы достичь дна водоема и вернуться обратно. Рыболовные суда используют эхолот или гидролокатор для поиска стай рыб.

Океанографы используют сонар, чтобы отобразить контуры дна водоема. Звуковые сигналы могут пробивать толщу дна сквозь ил и песок и отрисовать слой породы под ними. Сигнал затем возвращается, давая расстояние до твердой поверхности.
Тот же принцип используется при поиске нефти на суше. Сонар отправляет импульс сквозь землю, импульс отражается с различной частотой от разных слоев почвы, и геологи могут определить какие виды грунта и пород присутствуют в почве. Это помогает определить места бурения, которые, скорее всего, содержат природные ресурсы. Это называется сейсморазведка.
Особый вид сонара используется в медицине и называется УЗИ (ультразвуковое исследование) или эхоскопия. Звуковые волны разной частоты производят различное эхо при отражении от разных органов тела. Врачи научились использовать эти сигналы, чтобы определять заболевания или контролировать развитие ребенка в утробе матери.
Звуковые волны очень высокой частоты используют в медицине и промышленности для чистки поверхностей от мельчайших инородных частиц.
История сонара
Сонар изобрела природа, задолго до того, как об этом задумался человек. Например, летучие мыши летают в темноте. Обходя препятствия и находя добычу при помощи ультразвуковых волн, которые человек услышать не в состоянии.
В 1906 году, американский военно-морской архитектор Льюис Никсон изобрел первый сонар для поиска айсбергов. Во время Второй мировой войны интерес к этой технологии возрос, т.к. возникла необходимость в обнаружении подводных лодок противника. В 1915 году такую первую действующую модель изобрел французский физик Поль Ланжевен. Первые приборы могли только слушать сигналы, но не могли излучать. Но уже к 1918 году Великобритания и Соединенные Штаты произвели образцы, которые могли отправлять сигнал и получать его обратно. Так же, как и с радарными технологиями, технологии сонаров постоянно совершенствуются и по сей день. Например, в 2000-х годах ВМС США ввели в оборот сонары, которые чистили военные мины.
ASDIC

Содержание
История создания и развития
Ранняя гидролокация
Осциллятор Фессендена
В 1915 году, после гибели Титаника, канадский ученый Реджинальд Фессенден запатентовал устройство, прозванное позже «осциллятором Фессендена». По сути, это устройство стало первым активным акустическим гидролокатором, поскольку основывалось на принципе улавливания отраженного сигнала. Осциллятор ставился на подводные лодки Первой Мировой волны, но чаще использовался для передачи сообщений, т.к. в связи с низкой частотой волны плохо справлялся с обнаружением небольших объектов, таких как подводные лодки или небольшие суда.
Создание системы и ее развитие
Работы по созданию активной гидролокационной системы, способной обнаруживать подводные лодки противника велись еще середины Первой Мировой войны. Первые версии системы появились в 1919 году и были протестированы на корабле HMS Antrim, в обстановке строжайшей секретности. Спустя какое-то время ASDIC начала появляться на эсминцах Королевского флота и к концу 30-х годов была установлена почти на все корабли Великобритании.
Первая версия системы ASDIC являла собой осциллятор Фессендена, выполненный на кварцовых пьезоизлучателях. Благодаря использованию пьезоэлементов удалось существенно повысить частоту волну и увеличить шанс обнаружения небольших объектов, однако рабочая дистанция системы составляла около двух километров. Тем не менее, система доказала работоспособность и позже была использована для тренировки операторов.

К началу Второй Мировой войны система ASDIC претерпела существенные изменения:
Описание действия активного гидролокатора ASDIC

Принцип действия активного гидролокатора состоит в следующем:
Следует заметить, что система ASDIC ставилась как на корабли, так и на подводные лодки (типа Т, например), однако на подводных лодках использовалась гораздо реже. Причина заключалась в том, что при сканировании пространства испускался звуковой сигнал, который мог быть услышан пассивными гидролокационными системами кораблей противника, что демаскировало подводную лодку и сводило на нет эффект внезапности. Чаще всего оператор включал сонар лишь на короткое время перед самой атакой для точного определения дистанции до противника.
На кораблях же активная гидролокация использовалась гораздо чаще, т.к. подводные лодки противника и так знали о существовании кораблей в этом районе. Еще одной причиной было психологическое давление на противника: слыша множественные сигналы от нескольких активных сонаров, капитан подводной лодки нередко опасался атаковать скопление кораблей противника.
Преимущества и недостатки системы

Появление активных гидролокационных систем значительно увеличило шансы на поражение подводных лодок противника. Основные преимущества использования ASDIC заключались в следующем:
Тем не менее, были и существенные минусы, ограничивающие использование системы:
Аналоги
К началу Второй Мировой войны между Великобританией и США было заключено соглашение под названием «Миссия Тизарда», по которому страны обменивались научно-техническими разработками. К тому времени в США уже велись работы по созданию активных гидролокационных систем, но в рамках соглашения была передана и информация по системе ASDIC. Благодаря этому, ASDIC стала основой для создания американской системы SONAR ( англ. Sound Navigation and Ranging ), которой на американском флоте стала обозначаться вся система гидролокации, как активная, так и пассивная. Слово SONAR также позже стало нарицательным, обозначая активную часть гидролокационного оборудования.
Галерея
![]()
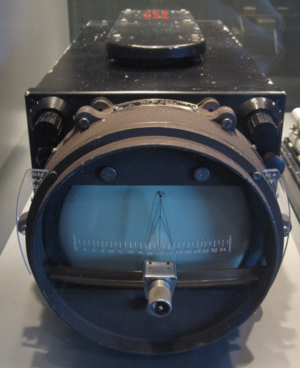
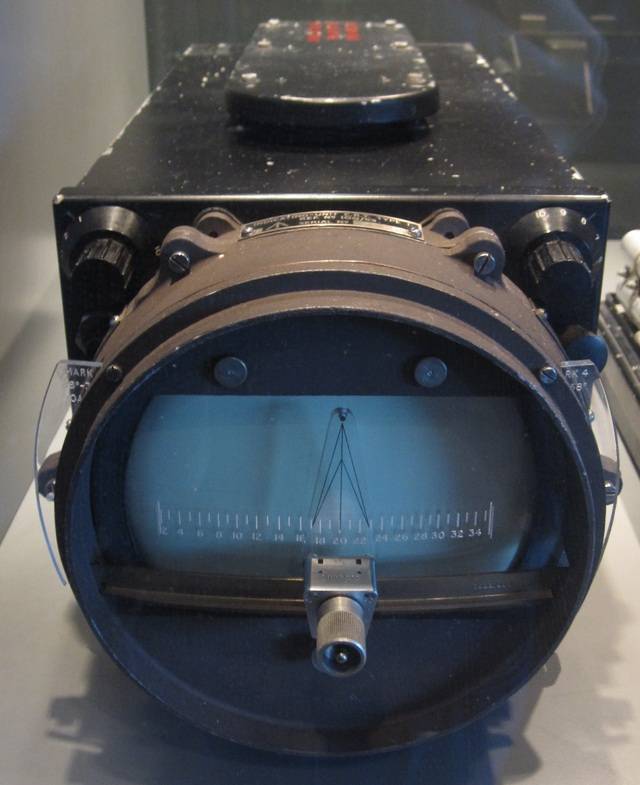
Пример оборудования для записи дистанции, входящего в систему ASDIC
Радиоэлектронная борьба. Битва за Атлантику. Часть 1
С началом войны фактически единственным средством поиска и обнаружения субмарин был британский ASDIC (аббревиатура от англ. Anti-Submarine Detection Investigation Committee, Исследовательский комитет по обнаружению подводных лодок). Это был прообраз современного сонара, работал он по принципу эхолокации. Применение ASDIC создавало определенные проблемы «волчатам» Деница, и летом 1940 году тот предложил поменять тактику атак на конвои союзных войск.
По наблюдениям гросс-адмирала, эскортное охранение британцев чаще всего состояло из не самых новых кораблей, отличающихся слабой защитой и не самыми совершенными эхолокаторами. Поэтому атаковать корабли охранения немцы решили ночью и из надводного положения, в котором ASDIC не мог на достаточном расстоянии обнаружить субмарины. А ночь неплохо скрывала торчащие рубки немцев от наблюдателей как с воздуха, так и с кораблей. И тактика Деница дала обильные плоды – лодки серии U безнаказанно отправляли на дно все новые и новые корабли с завидной регулярностью.

Один из эпизодов битвы за Атлантику
Любая война очень похожа на шахматную партию – каждый ход противника вынуждает противостоящую сторону искать ответные шаги. И Великобритания ответила установкой на корабли и самолеты береговой охраны специальных противолодочных РЛС типа Mark I. В частности, первым в мире самолетом с бортовым локатором стал двухместный тяжелый истребитель Bristol Beaufighter Mk IF, на который монтировалась версия локатора AI Mark I массой 270 кг. Но эта РЛС не совсем подходила для обнаружения подлодки в надводном положении, и в начале 1941 года её заменили на Mark II. Эта аппаратура уже позволяла «высмотреть» торчащую рубку на дальности до 13 км, но и с ней были сложности. Дело в том, что ночью самолет не мог зайти на бомбометание немецкой подлодки, так как помехи от морской поверхности маскировали местоположение субмарины. Самолету приходилось лететь на высотах, не превышавших 850 метров, иначе отраженные от воды сигналы РЛС засвечивали экраны. Но свою роль такая техника все-таки сыграла – немцы в атаках поубавили прыти, и потери ВМС Британии снизились, особенно в зоне досягаемости Берегового командования.

Bristol Beaufighter Mk IF — первый в мире крылатый носитель РЛС
Именно с этого момента у немецких подводников появляется ответная реакция – массированное нападение на конвои «волчьей стаей» со всех сторон. Причем делать это немцы стали в удалении от берегов Британии, что исключало обнаружение самолетами с их вездесущими локаторами. Досталось тогда и американцам – в мае и июне 1942 года гитлеровцы потопили около 200 торговых судов янки.
Ответ не заставил себя долго ждать. На тяжелые и «дальнобойные» самолеты типа Consolidated B-24 Liberator союзники установили новые РЛС, работающие на частотах 1-2 ГГц, а также мощные прожекторы Leigh Light.

Прожектор Leigh Light под крылом B-24 Liberator
Последние позволяли осветить лучом всплывшую для атаки подлодку немцев с расстояния 1,5 км, что резко упрощало атаку на неё. В итоге немецкие U-лодки пошли на дно гораздо быстрее и веселее. В борьбе с такими британскими хитростями на германских субмаринах появились в середине 1942 года обнаружители локаторов модели FuMB1 Меtox, позже FuMB9 Wanze и FuMВ10 Borkum, разработанный слишком поздно FuMB7 Naxos и так далее до самого окончания войны. Немцы лишь изменяли рабочий диапазон принимаемого радиоизлучения и чувствительность. Примечательно, что приемники для Metox немцы позаимствовали в готовом виде со складов французской фирмы. Придумывать пришлось разве что приемные антенны, которые в спешке сооружались вокруг деревянного креста, за что и получили прозвище «Бискайский крест». Ключевым преимуществом таких приёмников было раннее обнаружение излучения авиационных локаторов британских сил. Как только командир субмарины получал сигнал от Metox (или более поздних версий), он тут же экстренно погружал лодку под воду. И все это происходило до обнаружения лодок самолетными РЛС.
Аппаратура управления FuMB1 Меtox
Бороться с Metox британцы решили простым и проверенным способом – сменой частоты и длины радиоволны локатора. В начале 1943 года появилась Mark III с частотой 3 ГГц с длиной волны в 10 см. Теперь самолеты могли подлетать к ничего не подозревавшей субмарине, которая, к примеру, всплыла для подзарядки батарей. Metox в такой ситуации молчал. И немцы в этой истории поначалу серьезно промахнулись в предположениях относительно причин обнаружения U-лодок. Оставшиеся в живых командиры рассказывали, что перед ночным налетом не слышали тревоги от Metox, но инженеры по какой-то причине не послушали моряков. Вместо этого решили, что англичане пеленгуют субмарины по… тепловому излучению дизелей! В итоге потратили уйму времени и средств на оборудование теплоизоляции моторных отсеков подлодок. На субмарины установили специальные теплозащитные экраны, которые ничего не дали, кроме снижения скорости хода подводных судов. Естественно, ничего толкового из этой акции не вышло, и в мае-июне 1943 года немцы потеряли около сотни подлодок. Озарение немцам пришло после того, как в Роттердаме обнаружили части РЛС H2S (лампу магнетрона) на сбитом британском самолете. В итоге все силы бросили на разработку нового приемника радиолокационного излучения длиной волны 10 см.
Пытались немцы ввести в заблуждение «летающие радары» с помощью воздушных шаров, которые оставляли висеть на высоте 10 метров над морем. Такие ловушки под кодовым именем Bold оснащались стальными кабелями для отражения сигналов РЛС союзников и крепились к дрейфующим буям. Но эффективность их была ожидаемо низкая – эффективная площадь рассеивания у Bold была значительно ниже, чем у подлодки, что легко фиксировалось на экране радара. Неожиданным выходом стал шноркель, который встал на многие субмарины немцев в конце 1943 года – с его помощью можно было подзаряжать аккумуляторы, просто высунув его над водой. Немцы даже покрывали их специальным радиопоглощающим материалом — здесь локаторы были почти бессильны. Когда субмарины стали оснащаться FuMB7 Naxos, способным эффективно определять облучение РЛС с длиной волны 10 см, уже было поздно – потери подлодок у немцев были слишком велики.
Но не только с помощью локаторов вели охоту на «волчьи стаи» Деница. Для связи с большой немецкой землей субмарины вынуждены были всплывать, определять свои координаты и радировать командованию либо соседним судам. Вот тут их и пеленговали силы флота союзников, передавали координаты охотникам и топили немцев. Обычно в состав группы охотников входили пара-тройка эсминцев или фрегатов, которые оставляли мало шансов противнику. Во избежание таких потерь у немцев появилось ноу-хау – «шприцевые» передачи, которые заранее записывались в ускоренном виде, а потом передавались всего за доли секунд. На станции приема стоило только замедлить запись радиограммы.


Автоматический радиопеленгатор Huff-Duff и его антенна на боевом корабле
Ответом стал автоматический радиопеленгатор Huff-Duff, заточенный на перехват и определение пеленга таких «скорострельных» радиопередач. Их ставили как на корабли, так и на береговые посты, что упрощало триангуляцию. Это стало еще один скромным гвоздиком в крышку гроба немецких кригсмарине.
В общем, по итогам войны можно констатировать, что немецкое командование ВВС и ВМС нередко пренебрегало радиоэлектронной разведкой. А между тем регулярный перехват электромагнитного излучения в небе Британии многое бы рассказал немцам о тонкостях войны.
Американским ВМС запретили использовать сонар-убийцу

Поисковое судно с сонаром SURTASS/LFA
Девятый окружной апелляционный суд Сан-Франциско запретил ВМС США использовать мощный буксируемый подводный низкочастотный сонар SURTASS/LFA в мирное время. Как пишет Wired, соответствующее постановление было принято 15 июля текущего года. Сонар, предназначенный для поиска подводных лодок противника, признали опасным для жизни морских животных.
Сонар представляет собой буксируемое устройство, которое на специальном тросе тянет за собой корабль — охотник на подводные лодки. Устройство оснащено 18 излучателями и приемниками работающими в инфразвуковом диапазоне волн на частотах от 100 до 500 герц. Считается, что такие сонары дезориентируют морских животных и могут служить причиной их выбрасывания на берег.
До сих ВМС США руководствовались «Национальным актом о защите морских обитателей», вступившим в силу в 1972 году. Этот документ предполагал, что сонары могут наносить вред морским животным. Этот же акт разрешал военным задействовать средства звукового обнаружения только в том случае, если отсутствовало прямое доказательство присутствия в зоне работы устройства млекопитающих.
При этом документ не оговаривал места, безусловно запрещенные для «осмотра» сонаром. В результате этой «дыры» в законе ВМС США иногда даже включали сонары в акватории Галапагос. Национальная служба по определению морских рыбных ресурсов Национального управления океанических и атмосферных исследований, разработавшее акт о защите, заявило, что тщательно изучит решение суда.
В ноябре прошлого года в США проводилось расследование причин гибели двух бутылконосых дельфинов, найденных 21 октября 2015 года на пляжах Империал и Сильвер Стрэнд в Сан-Диего. Предположительно, причиной гибели дельфинов могло стать использование кораблями ВМС США активных сонаров в прибрежных водах Калифорнии.
Американские военные включали сонары, когда их корабли находились в 80 морских милях (148 километров) от тех мест, где нашли мертвых дельфинов. Сонары на двух кораблях ВМС США работали короткими включениями с 19 октября, а общее время их работы за несколько суток составило около часа. Средства обнаружения использовались во время учения.
Еще до завершения расследования Национальная служба по определению морских рыбных ресурсов уведомила судебные органы о гибели дельфинов и возможном нарушении ВМС США правил использования сонаров.
Корабли используют сонары для поисках различных объектов под водой, включая роботов и подводные лодки. Сонар излучает звуковой сигнал, а затем принимает отраженные звуковые колебания и на их основе определяет местоположение подводных объектов. Активные сонары могут нарушать вскармливание детенышей морскими млекопитающими и нарушать их обмен информацией.
Сонар подводной лодки что это
В 1916 году американский флот разработал и начал устанавливать на своих кораблях «слушающее устройство» SC, аналогичное британскому гидрофону. К концу Первой Мировой войны такое устройство широко применялось противолодочными кораблями союзников, а проведенные улучшения сделали его очень чувствительным. Опасаясь обнаружения, подводная лодка могла на короткое время отключать моторы или вообще неподвижно отлеживаться на морском дне. Но гидрофон мог засечь самый слабый звук — даже тихое жужжание моторчика гирокомпаса.
Однако гидрофон имел и существенные недостатки. Прежде всего, он воспринимал шумы винтов всех кораблей, находящихся поблизости, а не только подводной лодки. Чем выше были его акустические качества, тем больше шумов он принимал. Оператор прибора SC не мог отстроиться от посторонних шумов. В головных телефонах постоянно слышались шуршание и потрескивание, поэтому требовалось обладать острым слухом и уметь различать шумы.
Хотя гидрофон и давал общее направление на подводную лодку, он не определял расстояние. В конце Первой Мировой войны охотники за подводными лодками продолжали стоять перед проблемой определения расстояния, от чего зависела точность выхода корабля на цель. Поэтому гидрофон не решал всех проблем. Опытный оператор был способен обнаружить находящуюся под водой лодку и указать примерное направление на нее. Однако он не мог определить расстояние до лодки.
В период между войнами достижения электроники позволили преодолеть некоторые недостатки гидрофона. Британский и американский флоты создали устройство, способное измерять расстояние до погрузившейся лодки. Это высокочастотное электронное устройство действовало, используя принцип эхолокации. Англичане назвали его асдиком, а американцы — сонаром.
Описание электронной части сонара было бы слишком сложным, поэтому мы не будем вдаваться в детали того, «как» это происходит, а лишь кратко изложим, «что» происходит. Сонар расположен в обтекаемом контейнере под днищем корабля. Оператор может использовать его двумя способами: или просто слушать шумы, чтобы засечь звук винтов или внутренних механизмов лодки, или вести эхолокацию, чтобы обнаружить лодку и замерить расстояние до нее. Оба способа основаны на законах гидроакустики. Прослушивание означает именно прослушивание. Оператор сонара слушает все подводные шумы и старается различить среди них те, которые издает подводная лодка. Определение дистанции и направления происходит несколько сложнее.
Эхолокация — это процесс определения пеленга и дистанции до подводного объекта путем посылки направленного звукового сигнала и приема отраженного эха направленным звукоулавливающим устройством. В этом случае оператор сонара посылает в воду острый пучок звуковых импульсов — высокое «динь». Как и радиоволна, акустический сигнал может идти в воде многие мили, пока не встретит какое-то препятствие. Обладая особыми свойствами, акустический сигнал отражается от встреченного объекта. В результате это «динь» превращается в резиновый мячик, который, отскочив от цели, возвращается к бросившему его. Интервал времени до возвращения сигнала (эха) дает расстояние до цели, а траектория дает пеленг на цель.
Кроме того, акустический сигнал, отразившись от движущегося объекта, меняет свою частоту (эффект Допплера). Это может подсказать оператору характер перемещений цели. По величине изменения частоты опытный оператор сонара всегда определит, что это такое: движущийся корабль, неподвижные обломки, подводная лодка или кит.
С появлением сонара многие оптимисты решили, что подводная лодка потеряла свой плащ-невидимку. Любой противолодочный корабль, оснащенный сонаром, мог сесть на хвост лодке. После этого оставалось лишь засыпать ее глубинными бомбами.
И снова оптимизм оказался чрезмерным. Подводные лодки Деница попытались обмануть сонар с помощью имитационных патронов «Pillenwerfer» — специальных химических патронов, создающих облако воздушных пузырьков, отражающих акустический сигнал. Но этот имитатор не создавал эффекта Допплера, и опытные операторы вскоре научились отличать действительные и ложные подводные цели. Поэтому воздушные пузырьки не помогли. Более того, они скорее помогали акустикам определять дистанцию, чем мешали.
Но работа с сонаром требовала от оператора умения быстро ориентироваться в какофонии звуков, пойманных акустическими приемниками, и способности идентифицировать эхо-сигналы. Лишь очень хорошо подготовленный человек мог справиться с этим. И лишь хорошо подготовленные офицеры могли использовать полученную информацию наилучшим образом.
Морская вода состоит из слоев различной плотности. Эти скачки плотности в основном вызваны перепадами температуры (на поверхности вода, как правило, теплее, чем в глубине) или различным уровнем солености. Подводная лодка может избежать обнаружения сонаром, если укроется под слоем более плотной воды. На границе слоев происходит преломление и отражение акустического сигнала, и луч уходит в сторону. Кроме того, лодка может использовать собственный сонар для обнаружения на поверхности корабля, который охотится за ней.
Поэтому игра в кошки-мышки не всегда заканчивается в пользу охотника. И подводная лодка совсем не устарела после появления сонара.
Опыты с гидролокаторами начались на американских эсминцах еще в 1934 году. Это устройство было установлено на кораблях ДЭМ-20 капитана 2 ранга Дж. К. Джоунса. Эсминцы «Раберн», «Уотерс», «Тэлбот» и «Дент», а также 2 подводные лодки стали первыми американскими кораблями, получившими гидролокаторы. Когда ситуация в Европе начала принимать угрожающий характер, флот решил ввести в строй старые четырехтрубники и оснастить их сонарами для использования в качестве противолодочных кораблей. К сентябрю 1939 года около 60 эсминцев американского флота получили сонар. В этот же период флот открыл первую школу гидроакустиков.


